

ホーム > でん粉 > 調査報告 > UAV(無人航空機)を利用した農作物の生育診断
UAV(無人航空機)を利用した農作物の生育診断
最終更新日:2018年7月10日

UAV(無人航空機)を利用した農作物の生育診断
〜マルチスペクトルカメラを用いたばれいしょ圃場のセンシング〜
2018年7月
岩手大学大学院連合農学研究科 田邊 大
山形大学農学部 中坪 あゆみ、片平 光彦
山形大学農学部 中坪 あゆみ、片平 光彦
【要約】
わが国の食料生産は多くの課題を抱えており、その解決策として耕作放棄地を利用した畑作物の生産や精密農業による農作業の効率化、省力化が考えられる。本研究は、効率的に農作物の生育情報を取得するシステムの開発を目的に、農業現場への普及が進んできているUAV(無人航空機)をばれいしょ圃場のモニタリングに活用し、得られた空撮画像で生育診断を実施した。空撮画像から求めたNDVI(正規化差分植生指数)データは、ばれいしょの生育ステージに合わせて変化し、葉緑素含量を推定することに有効である。
はじめに
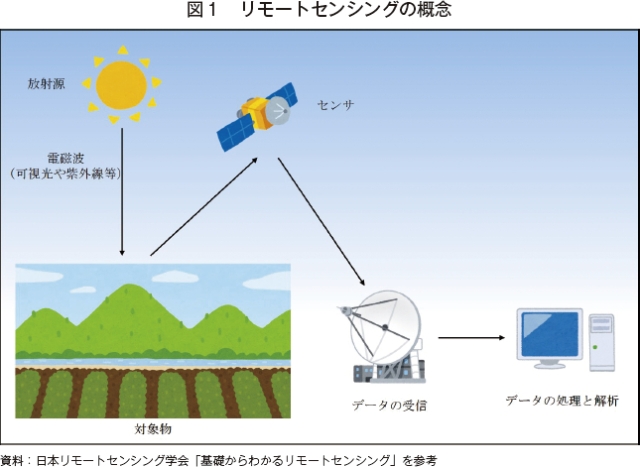
現在、わが国では農業従事者数が年々減少しており、担い手不足による耕作放棄地の増加が問題となっている。生産現場では、担い手不足による篤農技術の途絶が危惧され、情報技術を高度に活用したデータに基づく農業、精密農業が注目されており、その基幹技術としてリモートセンシングがある。リモートセンシングとは、測定対象から離れた計測機器によって可視光線、赤外線、電磁波などの情報を集める技術(図1)で、観測装置(センサー)とそれを上空に運ぶプラットフォームで構成されている。観測装置としては、デジタルカメラ、放射計、レーダーなどが用いられ、プラットフォームには航空機や気球、ヘリコプター、人工衛星などが利用される。農業におけるリモートセンシングでは、人工衛星や航空機による情報を基にしたものがすでに実用化されているが、近年それらに代わる新しいプラットフォームとしてUAVが登場してきた。
そこで、筆者は農業現場への普及が進んできているUAVを活用し、その空撮画像を用いた農作物の生育情報を効率的に取得するシステムの開発を行った。本稿では、開発したモニタリングシステムとそれを用いた土地利用型畑作物であるばれいしょの生育解析事例を紹介する。
そこで、筆者は農業現場への普及が進んできているUAVを活用し、その空撮画像を用いた農作物の生育情報を効率的に取得するシステムの開発を行った。本稿では、開発したモニタリングシステムとそれを用いた土地利用型畑作物であるばれいしょの生育解析事例を紹介する。
1.解析事例の概要
(1)試験圃場
実験は、山形県鶴岡市に位置する山形大学農学部付属やまがたフィールド科学センター(高坂農場)内の圃場(長辺40メートル、短辺20メートル、面積8アール)で行った。試験圃場は2017年4月21日に粗耕起した後、4月25日に施肥と耕運を行い、催芽させたばれいしょを畝間75センチメートル、株間30センチメートルの条件で定植した。供試したばれいしょの品種はトヨシロである。施肥体系は、土壌改良材として苦土重焼リンを10アール当たり20キログラム、基肥は高度化成肥料(N:P2O5:K2O、14:14:14)を同8.4キログラム、追肥として5月29日に硫安を同4.2キログラム散布した。雑草・病害虫防除は適宜行った。
(2)実験機の構成と撮影条件
圃場の空撮は、空撮用マルチコプターS900(DJI社、写真1)にマルチスペクトルカメラ(MicroMCA/RGB+3、Tetracam社〈写真2〉)を 取り付けて行った。空撮は太陽が高い位置にある午前10時から午後2時までの間に行った。
供試したUAVは基盤が内蔵されたプレート部、ESC(Electronic Speed Controller)(注1)やモーターが搭載されるアーム部、ジンバル(注2)やスキッドが搭載される下腹部で構成した。プレートにはコントローラー、3軸加速度センサー、3軸ジャイロセンサー、気圧計などのフライトコントローラーやGPS(A2、DJI社)、受信機(Lightbridge2、DJI社)などが搭載されている。特に、フライトコントローラーは、機体の状態や飛行環境に合わせて各モーターの回転速度を制御しているため、従来の無人ヘリコプター以上の安定した飛行が可能である。UAVの機体寸法は全長、全幅が900ミリメートル、全高が640ミリメートルである。ペイロード(最大積載重量)は8.2キログラムである。
供試したマルチスペクトルカメラは解像度が1280×1024で、視野角は35.7°×28.9°×44.8°となっている。マルチスペクトルカメラは四つのレンズを搭載しており、可視光域のRed、Green、Blue、赤外域の680ナノメートル、720ナノメートル、800ナノメートルの6バンドを捕捉することができる。ジンバルは三つのブラシレスモーターが搭載されており、機体の傾きに応じてカメラの角度を一定に保持する。
空撮は、ばれいしょが萌芽した後の5月29日、開花を開始した6月6日、開花期の6月20日、黄化を開始した7月13日、黄化期の7月20日、7月27日に行った。
UAVの操作は、あらかじめ設置した離着陸地点(人工芝のヘリポート)から離陸させ、圃場中心から上昇させていった。撮影高度は約80メートルである。試験圃場の空撮に要した時間は約5分であった。撮影はカメラに搭載されているタイムラプス(微速度撮影)機能を用い、2秒間隔で画像を取得した。
(注1)モーターの速度を制御する装置。
(注2)カメラを保持する装置。
供試したUAVは基盤が内蔵されたプレート部、ESC(Electronic Speed Controller)(注1)やモーターが搭載されるアーム部、ジンバル(注2)やスキッドが搭載される下腹部で構成した。プレートにはコントローラー、3軸加速度センサー、3軸ジャイロセンサー、気圧計などのフライトコントローラーやGPS(A2、DJI社)、受信機(Lightbridge2、DJI社)などが搭載されている。特に、フライトコントローラーは、機体の状態や飛行環境に合わせて各モーターの回転速度を制御しているため、従来の無人ヘリコプター以上の安定した飛行が可能である。UAVの機体寸法は全長、全幅が900ミリメートル、全高が640ミリメートルである。ペイロード(最大積載重量)は8.2キログラムである。
供試したマルチスペクトルカメラは解像度が1280×1024で、視野角は35.7°×28.9°×44.8°となっている。マルチスペクトルカメラは四つのレンズを搭載しており、可視光域のRed、Green、Blue、赤外域の680ナノメートル、720ナノメートル、800ナノメートルの6バンドを捕捉することができる。ジンバルは三つのブラシレスモーターが搭載されており、機体の傾きに応じてカメラの角度を一定に保持する。
空撮は、ばれいしょが萌芽した後の5月29日、開花を開始した6月6日、開花期の6月20日、黄化を開始した7月13日、黄化期の7月20日、7月27日に行った。
UAVの操作は、あらかじめ設置した離着陸地点(人工芝のヘリポート)から離陸させ、圃場中心から上昇させていった。撮影高度は約80メートルである。試験圃場の空撮に要した時間は約5分であった。撮影はカメラに搭載されているタイムラプス(微速度撮影)機能を用い、2秒間隔で画像を取得した。
(注1)モーターの速度を制御する装置。
(注2)カメラを保持する装置。


(3)使用した植生指数と画像合成、解析
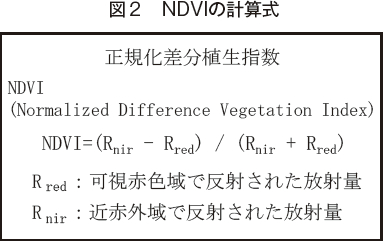
センサーから得られた情報から植物の生育を評価するための植生指数として、NDVIを用いた。これは、植物が反射するNIR(近赤外域)と吸収するRed(可視赤色域)によって算出される植生指数の一つで、図2のような式で算出することができる。このNDVIは、太陽の位置などによる照射条件の際の影響を軽減する特性を持つため、これまで多くの研究で用いられてきた。
供試センサーは異なる四つのレンズから6バンドの画像を取得するため、カメラ付属の画像合成ソフト(PixelWrench2、Tetracam社)でレンズ間の視差の補正と画像の合成を行った。まず、取得した6バンド分の画像を合成し6チャンネルのTIFF画像を作成した。次に、合成したTIFF画像から3チャンネル選択し、BMP形式のカラー画像を作成した。その後、作成したカラー画像からNDVIを算出した画像を作成した。また、3チャンネルのカラー画像から、植物体のピクセルごとの680ナノメートル、720ナノメートルの値を測定し、測定値からNDVI値を算出した。算出したNDVI値と収量などのデータを照合した。
供試センサーは異なる四つのレンズから6バンドの画像を取得するため、カメラ付属の画像合成ソフト(PixelWrench2、Tetracam社)でレンズ間の視差の補正と画像の合成を行った。まず、取得した6バンド分の画像を合成し6チャンネルのTIFF画像を作成した。次に、合成したTIFF画像から3チャンネル選択し、BMP形式のカラー画像を作成した。その後、作成したカラー画像からNDVIを算出した画像を作成した。また、3チャンネルのカラー画像から、植物体のピクセルごとの680ナノメートル、720ナノメートルの値を測定し、測定値からNDVI値を算出した。算出したNDVI値と収量などのデータを照合した。
2.結果
(1)画像合成
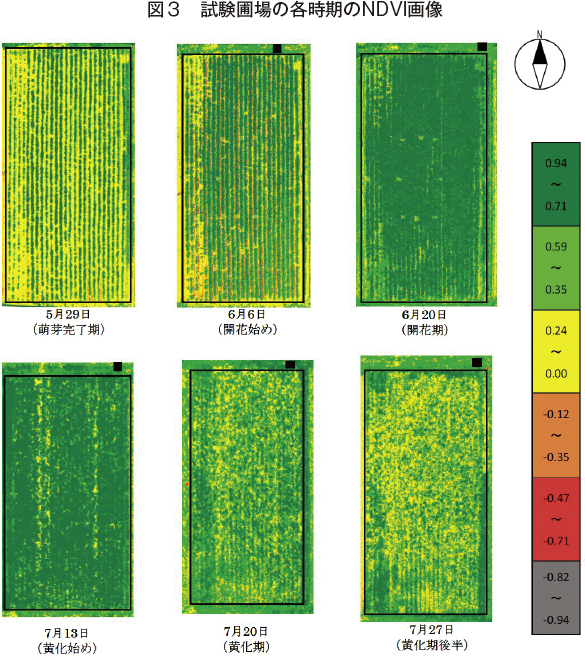
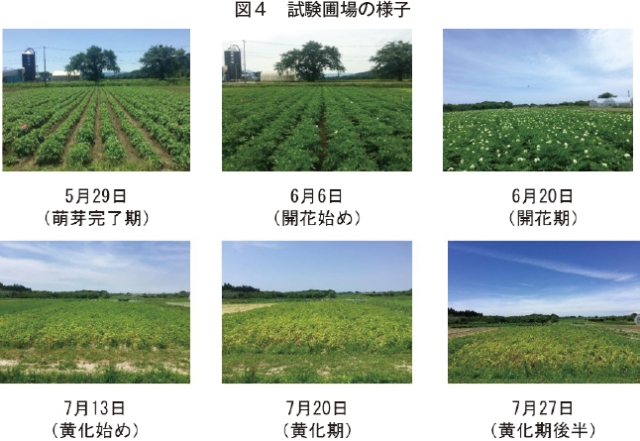
図3に試験圃場の各時期のNDVIの画像、図4に地上部の様子を示す。緑色の濃いところはNDVI値が高く、オレンジ、赤、灰色はNDVI値が低いことを示している。
萌芽期に当たる5月29日の画像では、萌芽の進行が確認できた。萌芽の進行にばらつきはあるが、これは定植時の種イモの状態の違いによって引き起こされた。次に、生育期間である6月6日、6月20日の画像では次第にNDVIが高くなり、畝間の縮小とともに生育量が旺盛になっていることが確認できた。開花期である6月20日のNDVI画像では濃い部分に薄緑の斑点が確認できる。これはNDVI値の低い花卉が写りこんだものであり、図4に示す6月20日の画像からも確認できる。黄化期である7月13日から7月20日、7月27日の画像では植物体が枯れていったため、葉面積が減少していくことが確認できた。なお、7月27日の画像では黒い部分と白い部分が混在していることがわかる。これは地上部が二次成長を始め、枯れた茎葉と新たに伸長してきた分枝が混在していたためであり、図4に示す7月27日の画像からも確認できる。以上から、本研究のモニタリングシステムは、ばれいしょ圃場に対する生育状況のモニタリングに使用できるといえる。
萌芽期に当たる5月29日の画像では、萌芽の進行が確認できた。萌芽の進行にばらつきはあるが、これは定植時の種イモの状態の違いによって引き起こされた。次に、生育期間である6月6日、6月20日の画像では次第にNDVIが高くなり、畝間の縮小とともに生育量が旺盛になっていることが確認できた。開花期である6月20日のNDVI画像では濃い部分に薄緑の斑点が確認できる。これはNDVI値の低い花卉が写りこんだものであり、図4に示す6月20日の画像からも確認できる。黄化期である7月13日から7月20日、7月27日の画像では植物体が枯れていったため、葉面積が減少していくことが確認できた。なお、7月27日の画像では黒い部分と白い部分が混在していることがわかる。これは地上部が二次成長を始め、枯れた茎葉と新たに伸長してきた分枝が混在していたためであり、図4に示す7月27日の画像からも確認できる。以上から、本研究のモニタリングシステムは、ばれいしょ圃場に対する生育状況のモニタリングに使用できるといえる。
(2)NDVI値とSPAD値
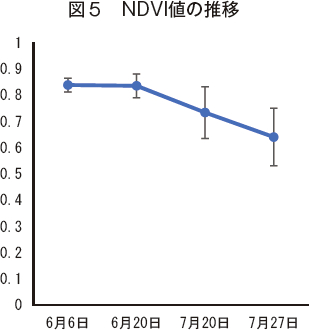
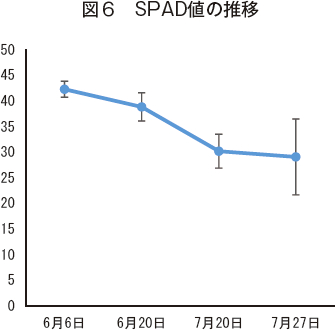
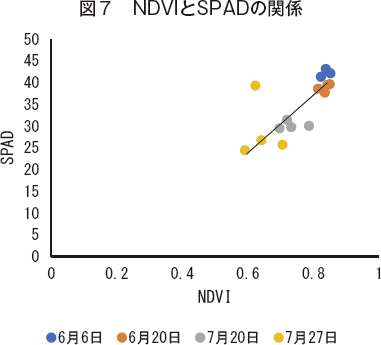
図5にNDVI値の推移、図6にSPAD値(葉緑素含量を示す値)の推移、図7にNDVIとSPADの相関関係を示す。
NDVI、SPADともに時期が進むにつれ値が小さくなっていった。これは、ばれいしょの地上部が少しずつ黄化していき、光合成活性が落ちていったためである。
また、黄化期に当たる7月20日、7月27日のNDVI値とSPAD値のばらつきが大きくなった。これは黄化期の地上部で二次成長が発生し、新葉と黄化葉が混在していたため引き起こされた。このことから、生育初期の方が生育後期よりもノイズが少なくデータのばらつきが小さいため、NDVIを用いたばれいしょのモニタリングには生育初期が有効である。
また、NDVI値とSPAD値には高い相関が見られた。SPAD値は植物の葉に含まれるクロロフィル量を示すことから、本研究のモニタリングシステムでばれいしょ地上部のクロロフィル量を空撮画像から推定することができる。
NDVI、SPADともに時期が進むにつれ値が小さくなっていった。これは、ばれいしょの地上部が少しずつ黄化していき、光合成活性が落ちていったためである。
また、黄化期に当たる7月20日、7月27日のNDVI値とSPAD値のばらつきが大きくなった。これは黄化期の地上部で二次成長が発生し、新葉と黄化葉が混在していたため引き起こされた。このことから、生育初期の方が生育後期よりもノイズが少なくデータのばらつきが小さいため、NDVIを用いたばれいしょのモニタリングには生育初期が有効である。
また、NDVI値とSPAD値には高い相関が見られた。SPAD値は植物の葉に含まれるクロロフィル量を示すことから、本研究のモニタリングシステムでばれいしょ地上部のクロロフィル量を空撮画像から推定することができる。
(3)収量調査結果とNDVIとの相関関係
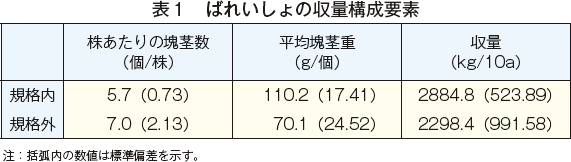
表1にばれいしょの収量構成要素と収量を示す。ばれいしょの平均収量は規格内品が10アール当たり2885キログラム、規格外品が同2298キログラムとなった。また、規格外収量のばらつきが大きくなった。規格外品の内訳で多かったものは小玉、食害、軟腐病であった。
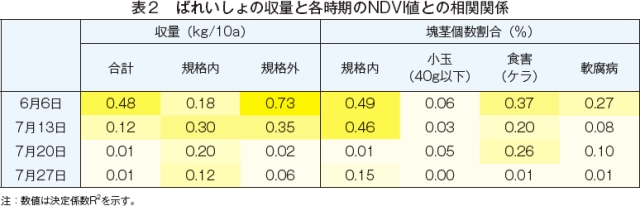
表2に収量と各時期のNDVI値の相関関係を示す。生育初期のNDVI値と収量で相関のある傾向が見られ、時期が進むごとに相関は小さくなっていった。ばれいしょは、萌芽後10〜20日ごろに塊茎を形成する。すなわち、調査日の6月6日は萌芽日から算出して塊茎の形成期に該当し、窒素吸収量を増加させて塊茎の肥大促進に影響を及ぼしたと考えられる。
表2に収量と各時期のNDVI値の相関関係を示す。生育初期のNDVI値と収量で相関のある傾向が見られ、時期が進むごとに相関は小さくなっていった。ばれいしょは、萌芽後10〜20日ごろに塊茎を形成する。すなわち、調査日の6月6日は萌芽日から算出して塊茎の形成期に該当し、窒素吸収量を増加させて塊茎の肥大促進に影響を及ぼしたと考えられる。
3.今後の展望
本稿で紹介した事例では、空撮や解析の過程は手動で行われており、本来のリモートセンシングの理念であるビッグデータの取得、解析を行うことは難しい。そのため、空撮や解析の工程を自動化、最適化することでこれまで以上のビッグデータの取得、解析を可能にする。特に、本試験のような画像解析には人工知能(AI)技術によるディープラーニングが有効である。今年度から本モニタリングシステムにAIによる解析技術を組み合わせ、次世代の栽培管理技術を構築することを目標とする。
また、今後はばれいしょ以外にも小麦、大豆を対象作目に追加し、合成画像と圃場に設置した各種センサーから得られる情報、作物生育と窒素吸収量に関する情報を解析し、実用的な畑輪作体系用モニタリングシステムを確立していく。
また、今後はばれいしょ以外にも小麦、大豆を対象作目に追加し、合成画像と圃場に設置した各種センサーから得られる情報、作物生育と窒素吸収量に関する情報を解析し、実用的な畑輪作体系用モニタリングシステムを確立していく。
このページに掲載されている情報の発信元
農畜産業振興機構 調査情報部 (担当:企画情報グループ)
Tel:03-3583-8678
農畜産業振興機構 調査情報部 (担当:企画情報グループ)
Tel:03-3583-8678









