

ホーム > でん粉 > 調査報告 > さつまいも生産に対するスマート農業一貫体系の導入による「超省力化・規模拡大」と 「単収増加・高品質化」の実証について
さつまいも生産に対するスマート農業一貫体系の導入による「超省力化・規模拡大」と 「単収増加・高品質化」の実証について
最終更新日:2023年1月10日

さつまいも生産に対するスマート農業一貫体系の導入による「超省力化・規模拡大」と 「単収増加・高品質化」の実証について
2023年1月
さつまいもカンパニー株式会社 代表取締役 橋本 亜友樹
【要約】
鹿児島きもつき農業協同組合を代表機関とし、複数の企業や教育機関で構成された鹿児島県さつまいもスマート農業実証コンソーシアムが、令和2年度スマート農業実証プロジェクトにおいて、「さつまいも生産に対するスマート農業一貫体系の導入による『超省力化・規模拡大』と『単収増加・高品質化』の実証」を課題テーマとして、2年間にわたって最先端技術を実際の生産現場に導入し技術実証を行った。かんしょ栽培に利用可能な機械やスマート農業機器、サービスを利用し、現場への技術導入とその効果、今後の課題を明らかにすることができた。また、実証成果をもとに、全国のかんしょ産地でスマート農業活用の手引きとなるように「サツマイモ生産に対するスマート農業一貫体系技術資料(サツマイモスマート農業活用マニュアル)」を作成した。
1 実証課題の背景
かんしょは、火山灰土壌での栽培に適しており、また台風などの災害に強いことから、鹿児島県の重要な基幹作物である。しかしながら、近年は、生産者の高齢化や減少、サツマイモ基腐病のまん延などにより、焼酎・でん粉などの加工用需要を満たせない状況にある。また、かんしょ生産は、いまだに人力に依存する作業が多く、労力がかかることから生産コストが高く、特にでん粉原料用は単価が安く収益性が低いことが問題である。
実証を行った鹿児島県鹿屋市は半島地域にあり、産業基盤が他の地域と比較して弱く、生産者の高齢化が進み、生産者数は減少し、耕作放棄地が増加している。地域の人口が都市部への流出で減少している中、基幹産業である農業を成長させないことには、地域の発展どころか現状維持すらも見込めない状況にある。
これらの問題を解決するためには、かんしょ生産に対するスマート農業一貫体系を導入し「超省力化・規模拡大」および「単収増加・高品質化」を実現することが必要不可欠であると考え、(1)生産者所得の増大(2)後継者・労働力不足の解消(3)地域関連産業の維持・拡大―を図り、農業分野における国際化にも耐え得る地域農業の実現を目標とした。
実証を行った鹿児島県鹿屋市は半島地域にあり、産業基盤が他の地域と比較して弱く、生産者の高齢化が進み、生産者数は減少し、耕作放棄地が増加している。地域の人口が都市部への流出で減少している中、基幹産業である農業を成長させないことには、地域の発展どころか現状維持すらも見込めない状況にある。
これらの問題を解決するためには、かんしょ生産に対するスマート農業一貫体系を導入し「超省力化・規模拡大」および「単収増加・高品質化」を実現することが必要不可欠であると考え、(1)生産者所得の増大(2)後継者・労働力不足の解消(3)地域関連産業の維持・拡大―を図り、農業分野における国際化にも耐え得る地域農業の実現を目標とした。
2 実証内容および結果
本実証課題は、農林水産省「スマート農業技術の開発・実証プロジェクト(課題番号:畑2H08、課題名:さつまいも生産に対するスマート農業一貫体系の導入による『超省力化・規模拡大』と『単収増加・高品質化』の実証)」(事業主体:国立研究開発法人農業・食品産業技術総合研究機構)の支援により実施された。導入したスマート農業技術体系の概要は次の通りである(表1)。
次に各項目の技術の概要、導入効果、今後の課題についてまとめる。
次に各項目の技術の概要、導入効果、今後の課題についてまとめる。

(1)苗床造成機を用いた苗床作り、苗床穴開機を用いた種いもの縦伏せ込み
ア 技術の概要
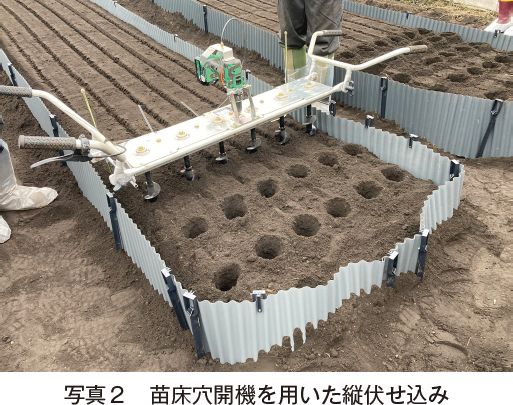
今後、育苗や植え付けの機械化を進める上での課題は、いかにして曲がりの少ない均一な長さの機械適応苗を大量生産できるかである。この課題解決に向けて、鹿児島県農業開発総合センターでは、新しい育苗方法の開発を進めている。この方法の大きな特徴は、苗床を造成する苗床造成機を用いて種いもを伏せ込むベッドを成形しながら、両側にあぜ波シートで簡易な防壁を設けることにある(写真1)。これにより、苗が倒伏しにくくなり、曲がりがなく真っ直ぐでそろいが良い苗を確保しやすくなり、生育制御も容易となる。また、一般的に種いもの伏せ込み(注1)は横向きに寝かせるが、頂芽を上にして垂直方向に伏せ込むことで、密植が可能となり、発芽も一定程度そろうようになる(写真2)。
(注1)苗を作るために種いもを植え付けて芽を出させる作業。
イ 導入効果
種いも縦伏せ込みは、通常の横伏せ込みよりも、面積当たりの種いも数が多くなり、合わせて採取苗数も多くなった。
また、伏せ込みの間隔が一定なので作業性が向上し、時間当たりの採取苗数が多くなった。
さらに、真っ直ぐな機械適応苗が採取できた。
ウ 今後の課題
苗床造成機は年に一度しか使用しない機械であるため、複数の生産者で共同購入するかシェアリングサービスを利用することが好ましい。
穴開け機は、現状は穴の間隔が一定で調整できないので、品種ごとの細かい調整ができない。
今後、育苗や植え付けの機械化を進める上での課題は、いかにして曲がりの少ない均一な長さの機械適応苗を大量生産できるかである。この課題解決に向けて、鹿児島県農業開発総合センターでは、新しい育苗方法の開発を進めている。この方法の大きな特徴は、苗床を造成する苗床造成機を用いて種いもを伏せ込むベッドを成形しながら、両側にあぜ波シートで簡易な防壁を設けることにある(写真1)。これにより、苗が倒伏しにくくなり、曲がりがなく真っ直ぐでそろいが良い苗を確保しやすくなり、生育制御も容易となる。また、一般的に種いもの伏せ込み(注1)は横向きに寝かせるが、頂芽を上にして垂直方向に伏せ込むことで、密植が可能となり、発芽も一定程度そろうようになる(写真2)。
(注1)苗を作るために種いもを植え付けて芽を出させる作業。
イ 導入効果
種いも縦伏せ込みは、通常の横伏せ込みよりも、面積当たりの種いも数が多くなり、合わせて採取苗数も多くなった。
また、伏せ込みの間隔が一定なので作業性が向上し、時間当たりの採取苗数が多くなった。
さらに、真っ直ぐな機械適応苗が採取できた。
ウ 今後の課題
苗床造成機は年に一度しか使用しない機械であるため、複数の生産者で共同購入するかシェアリングサービスを利用することが好ましい。
穴開け機は、現状は穴の間隔が一定で調整できないので、品種ごとの細かい調整ができない。

(2)ロボットトラクタ(自動走行トラクタ)による耕うん・整地作業
ア 技術の概要
ロボットトラクタ(自動走行トラクタ)は、GPS(全地球測位システム)の位置情報と地上基地局や基準点からの位置補正情報をもとに正確な位置情報を取得し、オペレータが乗車しなくても自動走行による圃場の耕うん・整地作業ができるトラクタである。しかし、現在の技術レベルでは、ロボットトラクタの自動運転での作業実施に当たっては、安全性確保のため、圃場に監視者を置く必要がある。また、圃場の枕地を含む圃場外周部2~3周はオペレータが乗車・操作して作業を行う必要があり、現状、自動走行での作業ができるのは圃場外周の内側のみである。
監視者がロボットトラクタとは別のトラクタに乗車し、作業しながらロボットトラクタを監視することで、1人のオペレータが2台のトラクタを使って同時作業することが可能となる(写真3)。2台のトラクタが接近し過ぎると危険で、逆に離れ過ぎても電波の届かない範囲に行くとロボットトラクタが停止するため、圃場区画によって最適な自動運転方法を選択する必要がある。
イ 導入効果
農林水産省(以下「農水省という」)の資料によると、平成29年度の耕起の作業時間は10アール当たり約0.62時間であるのに対し、ロボットトラクタの使用による作業時間は同0.23時間と63%の削減となった。
ウ 今後の課題
外周3周分を手動で運転する必要があることや、遠隔監視が必要であることから、単独で走らせる場合には省力化にならないどころか逆に作業時間が増えてしまうので、既存のトラクタとの同時作業を前提とした圃場の整備(大区画化など)が必要である。
また、トラクタの使用頻度が高いことや使用時期が重複することから、大規模農家でシェアリングするのは難しい結果となった。個別導入となるため、購入にあたっては補助金の活用など、十分な経営上の投資判断が必要である。
ロボットトラクタ(自動走行トラクタ)は、GPS(全地球測位システム)の位置情報と地上基地局や基準点からの位置補正情報をもとに正確な位置情報を取得し、オペレータが乗車しなくても自動走行による圃場の耕うん・整地作業ができるトラクタである。しかし、現在の技術レベルでは、ロボットトラクタの自動運転での作業実施に当たっては、安全性確保のため、圃場に監視者を置く必要がある。また、圃場の枕地を含む圃場外周部2~3周はオペレータが乗車・操作して作業を行う必要があり、現状、自動走行での作業ができるのは圃場外周の内側のみである。
監視者がロボットトラクタとは別のトラクタに乗車し、作業しながらロボットトラクタを監視することで、1人のオペレータが2台のトラクタを使って同時作業することが可能となる(写真3)。2台のトラクタが接近し過ぎると危険で、逆に離れ過ぎても電波の届かない範囲に行くとロボットトラクタが停止するため、圃場区画によって最適な自動運転方法を選択する必要がある。
イ 導入効果
農林水産省(以下「農水省という」)の資料によると、平成29年度の耕起の作業時間は10アール当たり約0.62時間であるのに対し、ロボットトラクタの使用による作業時間は同0.23時間と63%の削減となった。
ウ 今後の課題
外周3周分を手動で運転する必要があることや、遠隔監視が必要であることから、単独で走らせる場合には省力化にならないどころか逆に作業時間が増えてしまうので、既存のトラクタとの同時作業を前提とした圃場の整備(大区画化など)が必要である。
また、トラクタの使用頻度が高いことや使用時期が重複することから、大規模農家でシェアリングするのは難しい結果となった。個別導入となるため、購入にあたっては補助金の活用など、十分な経営上の投資判断が必要である。

(3)直進アシスト機能付きトラクタによる圃場準備作業
ア 技術の概要
直進アシスト(GS)機能は、GPS位置情報によりハンドルを自動的に操舵し、基準線に対して平行に直進走行することを支援する。1工程目に始点・終点を登録し基準線を設定すると、その基準線に対し作業幅に応じて平行に走行ラインが設定され、トラクタがその走行ラインに沿って直進走行する。次の走行ラインは、運転席のモニタ上に表示され、その走行ラインに合わせて旋回できるようにガイダンスが表示される。自動での旋回が可能な製品も存在する。
正確な直進作業を行うことは、作業の重なりやブレを小さく抑え、オペレータの負荷を少なくしながら効率的な作業を可能とする。また、非熟練者であっても、熟練者と同程度の精度と速度で直進作業が可能となる。
実証プロジェクトでは、直進アシスト機能付きトラクタに高性能アタッチメントを取り付けた、一工程作業機を使用し、3連サンソワーによる施肥・施薬、2畝マルチングを同時に行った(写真4)。
イ 導入効果
農水省の資料によると、平成29年度は耕起整地・基肥・追肥・防除の作業時間が10アール当たり8.39時間であるのに対し、直進アシスト機能付きトラクタと高性能アタッチメントを使用した場合の作業時間は、同3.55時間と58%の削減となった。
直進アシスト機能付きトラクタは、新規就農者でも熟練技術者並みの精度で作業が可能だった。蛇行しない分、作業時間が短縮され、疲労も軽減された。
3連サンソワーや2畝同時マルチングは省力化に大きく貢献した。また、3連サンソワーは肥料や農薬の無駄がないので経費削減になり、畝間の雑草に肥料がいかないので、雑草も抑えられた。
ウ 今後の課題
トラクタの使用頻度が高いことや使用時期が重複することから、大規模農家でシェアリングするのは難しい結果となった。個別導入となるため、購入にあたっては補助金の活用など、十分な経営上の投資判断が必要である。
直進アシスト(GS)機能は、GPS位置情報によりハンドルを自動的に操舵し、基準線に対して平行に直進走行することを支援する。1工程目に始点・終点を登録し基準線を設定すると、その基準線に対し作業幅に応じて平行に走行ラインが設定され、トラクタがその走行ラインに沿って直進走行する。次の走行ラインは、運転席のモニタ上に表示され、その走行ラインに合わせて旋回できるようにガイダンスが表示される。自動での旋回が可能な製品も存在する。
正確な直進作業を行うことは、作業の重なりやブレを小さく抑え、オペレータの負荷を少なくしながら効率的な作業を可能とする。また、非熟練者であっても、熟練者と同程度の精度と速度で直進作業が可能となる。
実証プロジェクトでは、直進アシスト機能付きトラクタに高性能アタッチメントを取り付けた、一工程作業機を使用し、3連サンソワーによる施肥・施薬、2畝マルチングを同時に行った(写真4)。
イ 導入効果
農水省の資料によると、平成29年度は耕起整地・基肥・追肥・防除の作業時間が10アール当たり8.39時間であるのに対し、直進アシスト機能付きトラクタと高性能アタッチメントを使用した場合の作業時間は、同3.55時間と58%の削減となった。
直進アシスト機能付きトラクタは、新規就農者でも熟練技術者並みの精度で作業が可能だった。蛇行しない分、作業時間が短縮され、疲労も軽減された。
3連サンソワーや2畝同時マルチングは省力化に大きく貢献した。また、3連サンソワーは肥料や農薬の無駄がないので経費削減になり、畝間の雑草に肥料がいかないので、雑草も抑えられた。
ウ 今後の課題
トラクタの使用頻度が高いことや使用時期が重複することから、大規模農家でシェアリングするのは難しい結果となった。個別導入となるため、購入にあたっては補助金の活用など、十分な経営上の投資判断が必要である。

(4)かん水装置付き自走式かんしょ挿苗機を用いた植え付け作業
ア 技術の概要
現在販売されている自走式かんしょ挿苗機は、機械上部にベルト式苗供給部があり、走行とともにベルトが回転し、セットされた苗が植え付け爪により自動的に挿苗されていく仕組みとなっている。苗供給部に人力で苗を1本ずつセットする必要があるが、腰をかがめずに楽な姿勢で作業ができる(写真5、6)。
栽培体系に合わせて、植え付け方法は「船底植え」「斜め植え」の2タイプから選択することが可能である。マルチ・裸地どちらにも対応しており、苗の挿入長さ、株間も調整可能である。苗挿込後に手植えと同じように土の上から一株ずつ鎮圧したり、かん水装置を装備して植え付け時に株元へかん水を行うことで、活着率を高めている。
イ 導入効果
農水省の資料によると、平成29年度は植え付けの作業時間が10アール当たり8.05時間であるのに対し、かん水装置付き自走式かんしょ挿苗機の使用により、同4.30時間と47%の削減になった。
かん水装置が付いているため、高温な日中でも挿苗が行える。また、降雨状況を気にせずに植え付けできるので、計画的な植え付けが可能となる。
ウ 今後の課題
操作に慣れるまでに経験が必要で、欠株無くまた活着良く植えるためには熟練が必要となる。
斜め植えの苗の活着は良好だったが、船底植えだと80%程度しか活着しなかった。生産性のさらなる向上には、苗のセット方法の工夫や機械適応苗を活用することが必要である。
現在販売されている自走式かんしょ挿苗機は、機械上部にベルト式苗供給部があり、走行とともにベルトが回転し、セットされた苗が植え付け爪により自動的に挿苗されていく仕組みとなっている。苗供給部に人力で苗を1本ずつセットする必要があるが、腰をかがめずに楽な姿勢で作業ができる(写真5、6)。
栽培体系に合わせて、植え付け方法は「船底植え」「斜め植え」の2タイプから選択することが可能である。マルチ・裸地どちらにも対応しており、苗の挿入長さ、株間も調整可能である。苗挿込後に手植えと同じように土の上から一株ずつ鎮圧したり、かん水装置を装備して植え付け時に株元へかん水を行うことで、活着率を高めている。
イ 導入効果
農水省の資料によると、平成29年度は植え付けの作業時間が10アール当たり8.05時間であるのに対し、かん水装置付き自走式かんしょ挿苗機の使用により、同4.30時間と47%の削減になった。
かん水装置が付いているため、高温な日中でも挿苗が行える。また、降雨状況を気にせずに植え付けできるので、計画的な植え付けが可能となる。
ウ 今後の課題
操作に慣れるまでに経験が必要で、欠株無くまた活着良く植えるためには熟練が必要となる。
斜め植えの苗の活着は良好だったが、船底植えだと80%程度しか活着しなかった。生産性のさらなる向上には、苗のセット方法の工夫や機械適応苗を活用することが必要である。


(5)ドローンによる薬剤散布
ア 技術の概要
農業用ドローンに農薬を積載して空中から散布する方法である。今までの農薬散布は主に動力噴霧器を使って人力・徒歩で作業する場合がほとんどで、時間がかかるだけではなく、肉体的にも精神的にも負担がかかる作業だった。急傾斜地など、人が入りにくい場所での防除作業はさらに労働強度が高くなる。
ドローンを使用する場合、上空から広範囲にわたって作業ができ、散布効率が飛躍的に上昇し、10アールを1分程で散布することが可能である(写真7)。さらに、事前にルート設定を行っておけば、自動で飛ばすことも可能で、特に大区画の場合には散布漏れの防止にもつながる。また、飛行データを確認することで農薬散布履歴の管理や散布忘れに活用することも可能である。
これまで空中散布と言えば産業用無人ヘリなどを活用していたが、無人ヘリは高価かつ非常に重く、1人では持ち運びができなかった。ドローンの場合は、ヘリよりも低空で散布でき、農薬の量を減らしながらより高い効果が得られやすく、小回りも利くので小さい面積の圃場でも散布が可能である。機種の大きさにもよるが、1人または2人で持ち運びができる。
イ 導入効果
農水省の資料によると、平成29年度は農薬散布の作業時間が10アール当たり1.64時間であるのに対し、ドローンによる農薬散布作業では、同0.40時間と76%の削減となった(移動と航路設定を含む)。
ドローンの自動航行を行うためには、事前に自動ルート設定作業が発生するが、同一圃場においては、次回以降の作業時間が大幅に削減される。
かんしょの農薬散布時期は7~9月の真夏であり、動力噴霧器を背負っての作業は大変な重労働で、朝夕の涼しい時間にしか作業ができなかったが、ドローンの使用によって、大きく軽労化されるとともに、農薬被ばくの危険性を減らすことができる。また、終日対応可能なので計画どおりに作業ができるようになる。
ウ 今後の課題
防除用ドローンは高価なので、生産者が各自で導入するよりも、シェアリングや作業委託のサービスを活用する形態が望ましく、これらのサービスが増えると普及が大いに進むと思われる。
かんしょに防除用ドローンで散布可能な殺虫剤の農薬登録が限られているため、殺虫剤抵抗性などを考えるとより多くの種類が散布できるようになる必要がある。
農業用ドローンに農薬を積載して空中から散布する方法である。今までの農薬散布は主に動力噴霧器を使って人力・徒歩で作業する場合がほとんどで、時間がかかるだけではなく、肉体的にも精神的にも負担がかかる作業だった。急傾斜地など、人が入りにくい場所での防除作業はさらに労働強度が高くなる。
ドローンを使用する場合、上空から広範囲にわたって作業ができ、散布効率が飛躍的に上昇し、10アールを1分程で散布することが可能である(写真7)。さらに、事前にルート設定を行っておけば、自動で飛ばすことも可能で、特に大区画の場合には散布漏れの防止にもつながる。また、飛行データを確認することで農薬散布履歴の管理や散布忘れに活用することも可能である。
これまで空中散布と言えば産業用無人ヘリなどを活用していたが、無人ヘリは高価かつ非常に重く、1人では持ち運びができなかった。ドローンの場合は、ヘリよりも低空で散布でき、農薬の量を減らしながらより高い効果が得られやすく、小回りも利くので小さい面積の圃場でも散布が可能である。機種の大きさにもよるが、1人または2人で持ち運びができる。
イ 導入効果
農水省の資料によると、平成29年度は農薬散布の作業時間が10アール当たり1.64時間であるのに対し、ドローンによる農薬散布作業では、同0.40時間と76%の削減となった(移動と航路設定を含む)。
ドローンの自動航行を行うためには、事前に自動ルート設定作業が発生するが、同一圃場においては、次回以降の作業時間が大幅に削減される。
かんしょの農薬散布時期は7~9月の真夏であり、動力噴霧器を背負っての作業は大変な重労働で、朝夕の涼しい時間にしか作業ができなかったが、ドローンの使用によって、大きく軽労化されるとともに、農薬被ばくの危険性を減らすことができる。また、終日対応可能なので計画どおりに作業ができるようになる。
ウ 今後の課題
防除用ドローンは高価なので、生産者が各自で導入するよりも、シェアリングや作業委託のサービスを活用する形態が望ましく、これらのサービスが増えると普及が大いに進むと思われる。
かんしょに防除用ドローンで散布可能な殺虫剤の農薬登録が限られているため、殺虫剤抵抗性などを考えるとより多くの種類が散布できるようになる必要がある。

(6)生産・経営管理システム
ア 技術の概要
パソコン・タブレット・スマートフォンなどで作業計画・実績を記録し、圃場や品目ごとの作業実績を見える化する。また、売上・経費情報、収量情報なども入力し、それらと組み合わせることで、生産コストの見える化や栽培計画・方法の改善、収量予測などに活用する。農薬・肥料使用記録、出荷情報や機械整備記録など、GAP認証取得やトレーサビリティの観点から必要となる情報についても管理することが可能である。
イ 導入効果
栽培履歴データと環境計測データを突き合わせることで、作業タイミングや改善すべき点などのフィードバックが得られ、正確なデータに基づいて次期作の栽培構成や農作業計画の見直しを行うことが可能になった。
ウ 今後の課題
実証プロジェクトで使用した生産管理システムは、入出力が簡単ではなく使いづらかったので、手書きの記録に代替できるような利便性はなかった。生産管理システムは、誰でも使いやすいスマホ入力を主にするなど、操作性を向上させる必要がある。
パソコン・タブレット・スマートフォンなどで作業計画・実績を記録し、圃場や品目ごとの作業実績を見える化する。また、売上・経費情報、収量情報なども入力し、それらと組み合わせることで、生産コストの見える化や栽培計画・方法の改善、収量予測などに活用する。農薬・肥料使用記録、出荷情報や機械整備記録など、GAP認証取得やトレーサビリティの観点から必要となる情報についても管理することが可能である。
イ 導入効果
栽培履歴データと環境計測データを突き合わせることで、作業タイミングや改善すべき点などのフィードバックが得られ、正確なデータに基づいて次期作の栽培構成や農作業計画の見直しを行うことが可能になった。
ウ 今後の課題
実証プロジェクトで使用した生産管理システムは、入出力が簡単ではなく使いづらかったので、手書きの記録に代替できるような利便性はなかった。生産管理システムは、誰でも使いやすいスマホ入力を主にするなど、操作性を向上させる必要がある。
(7)生育モニタリング
ア 技術の概要
ドローンに搭載した特殊カメラを使って空から撮影した画像(可視画像、近赤外画像)を解析することで、作物の生育状況を把握し、追肥の判断や圃場間の生育状況比較、病害虫発生検知、収量や収穫適期予測などに役立てることができる技術である。作物の収量・品質向上を図るには圃場ごとに細かい管理が必要であるが、栽培面積の拡大、圃場集積による大区画化が進むと、圃場ごとや圃場内の生育状況を把握することが難しくなるため、そのような状況に対して、きめ細かな栽培管理を支援する。
ドローンの使用により、短時間で大規模面積の生育状態を撮影し、撮影画像を合成しパソコンなどのモニター上に表示することで、現場での目視による確認がしにくい圃場内の生育状況や病害虫発生状況を把握することが可能となる。また、AIによる画像解析を利用し撮影画像を変換することで、生育状況や病害虫発生状況の色付け・マッピングすることも可能である。
イ 導入効果
解析ソフト「いろは」で変色した葉の抽出が容易になり、サツマイモ基腐病など病気の可能性の高い株の存在箇所を特定できるようになった。サツマイモ基腐病の可能性がある罹病株を、初期段階で圃場から持ち出すことで、被害を最小限に抑えることができると考えられる。
週次で虫害抽出結果を実証農家に提示することにより、圃場内の虫食い被害の早期発見につながり、農薬散布時期の判断の参考になった。
かんしょ生産者の栽培面積は拡大傾向にあるが、見回り確認に労力がかかること、繁茂した時に圃場中心部の状況確認できないことなどが課題としてあるため、ドローン撮影画像および画像解析で全体を俯瞰できることは有効な手段となった。
ウ 今後の課題
サツマイモ基腐病の可能性がある紫色/茶色の病変葉を画像解析で抽出することはできるが、他の病気などによる変色である可能性があり、実際にPCR検査をしないと病気名を特定することはできない。
実運用するにあたり、費用や時間を考えると、生産者がドローンで圃場の撮影を行う必要がある。撮影の手間やドローン操作の熟練が普及にあたっての課題となる。
ドローンに搭載した特殊カメラを使って空から撮影した画像(可視画像、近赤外画像)を解析することで、作物の生育状況を把握し、追肥の判断や圃場間の生育状況比較、病害虫発生検知、収量や収穫適期予測などに役立てることができる技術である。作物の収量・品質向上を図るには圃場ごとに細かい管理が必要であるが、栽培面積の拡大、圃場集積による大区画化が進むと、圃場ごとや圃場内の生育状況を把握することが難しくなるため、そのような状況に対して、きめ細かな栽培管理を支援する。
ドローンの使用により、短時間で大規模面積の生育状態を撮影し、撮影画像を合成しパソコンなどのモニター上に表示することで、現場での目視による確認がしにくい圃場内の生育状況や病害虫発生状況を把握することが可能となる。また、AIによる画像解析を利用し撮影画像を変換することで、生育状況や病害虫発生状況の色付け・マッピングすることも可能である。
イ 導入効果
解析ソフト「いろは」で変色した葉の抽出が容易になり、サツマイモ基腐病など病気の可能性の高い株の存在箇所を特定できるようになった。サツマイモ基腐病の可能性がある罹病株を、初期段階で圃場から持ち出すことで、被害を最小限に抑えることができると考えられる。
週次で虫害抽出結果を実証農家に提示することにより、圃場内の虫食い被害の早期発見につながり、農薬散布時期の判断の参考になった。
かんしょ生産者の栽培面積は拡大傾向にあるが、見回り確認に労力がかかること、繁茂した時に圃場中心部の状況確認できないことなどが課題としてあるため、ドローン撮影画像および画像解析で全体を俯瞰できることは有効な手段となった。
ウ 今後の課題
サツマイモ基腐病の可能性がある紫色/茶色の病変葉を画像解析で抽出することはできるが、他の病気などによる変色である可能性があり、実際にPCR検査をしないと病気名を特定することはできない。
実運用するにあたり、費用や時間を考えると、生産者がドローンで圃場の撮影を行う必要がある。撮影の手間やドローン操作の熟練が普及にあたっての課題となる。
(8)環境モニタリング
ア 技術の概要
圃場やハウス内外の環境(温湿度、日射量、風速、二酸化炭素濃度など)を各種センサーで自動測定し記録することで、測定値の履歴をパソコン・タブレット・スマートフォンなどで確認できる(写真8)。クラウド上にデータを保存するタイプでは、離れた場所から圃場やハウス内の環境を確認できる。
また、環境制御システムと組み合わせることで、生産者による設定値と測定値に基づき、自動で天窓の開閉やかん水などを実施することが可能となる。
イ 導入効果
記録された環境・土壌計測データとサンプリングした生育調査、収量に関わる形質について相関解析した結果は、植え付け時期の気象条件に合わせた管理、例えば、植え付け時期を早めたり、マルチの種類などを検討したりすることや、かんしょ以外の栽培作物も含めた次年度の作付け計画に有効活用できそうであった。
定点カメラの画像でもサツマイモ基腐病株は判別でき、初期の罹病株が2週間ほどで枯死することが確認できるなど観察に有効である。
ウ 今後の課題
メッシュ農業気象データ(注2)との連携を前提に考えると、基本的な気象データの取得は地域ごとに一つで十分で、その分、土壌水分など子機を増設することが有効であると考えられる。
環境計測機器は便利ではあるが、一生産者が導入するにはコストが高く、効果も限定的であることから、測定項目の絞り込みや地域単位での利用によるデータシェアの方法を検討するなど低コスト化を図る必要がある。
かんしょ栽培における圃場レベルでの計測データは水稲などと比較して格段に少なく、その適応性や範囲など検討するにあたっては、さらに広範なデータの集積と解析が必要である。環境データが収量や品質に与える影響を解析するには、年次や品種、栽培期間を含めた多くのデータの集積と詳細な解析を行う必要がある。
(注2)国立研究開発法人農業・食品産業技術総合研究機構(農研機構)が開発・運用する気象データサービス。全国の日別気象データを、約1キロメートル四方(基準地域メッシュ)を単位に提供している。
圃場やハウス内外の環境(温湿度、日射量、風速、二酸化炭素濃度など)を各種センサーで自動測定し記録することで、測定値の履歴をパソコン・タブレット・スマートフォンなどで確認できる(写真8)。クラウド上にデータを保存するタイプでは、離れた場所から圃場やハウス内の環境を確認できる。
また、環境制御システムと組み合わせることで、生産者による設定値と測定値に基づき、自動で天窓の開閉やかん水などを実施することが可能となる。
イ 導入効果
記録された環境・土壌計測データとサンプリングした生育調査、収量に関わる形質について相関解析した結果は、植え付け時期の気象条件に合わせた管理、例えば、植え付け時期を早めたり、マルチの種類などを検討したりすることや、かんしょ以外の栽培作物も含めた次年度の作付け計画に有効活用できそうであった。
定点カメラの画像でもサツマイモ基腐病株は判別でき、初期の罹病株が2週間ほどで枯死することが確認できるなど観察に有効である。
ウ 今後の課題
メッシュ農業気象データ(注2)との連携を前提に考えると、基本的な気象データの取得は地域ごとに一つで十分で、その分、土壌水分など子機を増設することが有効であると考えられる。
環境計測機器は便利ではあるが、一生産者が導入するにはコストが高く、効果も限定的であることから、測定項目の絞り込みや地域単位での利用によるデータシェアの方法を検討するなど低コスト化を図る必要がある。
かんしょ栽培における圃場レベルでの計測データは水稲などと比較して格段に少なく、その適応性や範囲など検討するにあたっては、さらに広範なデータの集積と解析が必要である。環境データが収量や品質に与える影響を解析するには、年次や品種、栽培期間を含めた多くのデータの集積と詳細な解析を行う必要がある。
(注2)国立研究開発法人農業・食品産業技術総合研究機構(農研機構)が開発・運用する気象データサービス。全国の日別気象データを、約1キロメートル四方(基準地域メッシュ)を単位に提供している。

3 冊子「サツマイモスマート農業活用マニュアル」の紹介
鹿児島県内だけではなく、全国的にかんしょ栽培で同様の課題を抱えた地域があると考えられる。また、かんしょに関するスマート農業技術の普及はあまり進んでいない。そのような状況に対し、全国のかんしょ産地でスマート農業活用の手引きとなるよう、「サツマイモ生産に対するスマート農業一貫体系技術資料(サツマイモスマート農業活用マニュアル)」を作成し、さつまいもカンパニー株式会社のホームページ上で公開している(注3)。
マニュアル内では、本稿で説明した技術概要の補足情報に加えて、かんしょ生産の一般的な工程、機械化やスマート農業の解説を記載しており、これからかんしょ生産に取り組もうとしている生産者や地域にとっても参考になる内容に仕上がっているので、ぜひ活用いただきたい。
(注3)「サツマイモ生産に対するスマート農業一貫体系技術資料(サツマイモスマート農業活用マニュアル)」(https://sweetpotato.co.jp/wp-content/uploads/2022/04/sweetpotato_smartagri_manual.pdf)
マニュアル内では、本稿で説明した技術概要の補足情報に加えて、かんしょ生産の一般的な工程、機械化やスマート農業の解説を記載しており、これからかんしょ生産に取り組もうとしている生産者や地域にとっても参考になる内容に仕上がっているので、ぜひ活用いただきたい。
(注3)「サツマイモ生産に対するスマート農業一貫体系技術資料(サツマイモスマート農業活用マニュアル)」(https://sweetpotato.co.jp/wp-content/uploads/2022/04/sweetpotato_smartagri_manual.pdf)
4 今後の展望
本実証プロジェクトによって、かんしょ栽培に対するスマート農業関連を含む最新技術の現場への導入とその効果の検証、および今後の課題は一通り洗い出しができたと感じている。
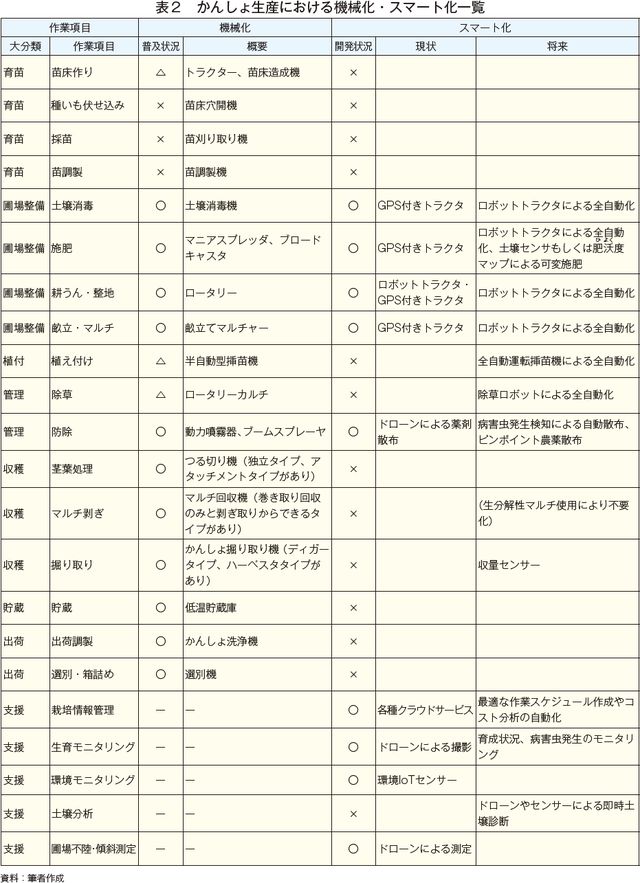
現時点でのかんしょ生産における機械化・スマート化の状況を一覧にまとめた(表2)。
これらの中では、スマート化はドローンによる農薬散布(散布サービスの利用を含む)、機械化は半自動型挿苗機の普及が今後進むであろう。それ以外については、費用対効果が小さく、機械やサービス自体の改良が必要であること、また効果的に活用するためには環境整備(圃場集約化など)や栽培工程の見直しなど、外部要因の改善が必要である。また、かんしょ栽培は、人力に依存し機械化されていない作業や、機械の開発はされているが普及が進んでいない作業がある。そのため、スマート化の前に機械化される必要があり、一気にスマート化まで進むことは難しいと考えている。
また、本実証プロジェクトでは「省力化」という面でのスマート農業技術が主であったが、新しい技術の効果的な導入にあたっては、先に経営や人材に対する状況の見える化が必要である。筆者は、「省力化」を実現する技術だけではなく、「人材育成」も大切と考え、現在かんしょ生産の営農活動における業務の整理を行い、「人材育成」という面でのスマート農業技術(農業版iCDのかんしょバージョン(注4))の確立に取り組んでいる。この両面がそろうことで、スマート農業技術(機械化を含む)の導入促進、および導入後の利活用が定着し、企業や地域の成長につなげることが可能になるであろう。
(注4)詳細は『野菜情報』2021年12月号「組織力向上に結びつく人材育成~トップリバーが運用を始めた自己診断ツール”農業版iCD”~」(https://vegetable.alic.go.jp/yasaijoho/senmon/2112_chosa1.html)を参照されたい。
現時点でのかんしょ生産における機械化・スマート化の状況を一覧にまとめた(表2)。
これらの中では、スマート化はドローンによる農薬散布(散布サービスの利用を含む)、機械化は半自動型挿苗機の普及が今後進むであろう。それ以外については、費用対効果が小さく、機械やサービス自体の改良が必要であること、また効果的に活用するためには環境整備(圃場集約化など)や栽培工程の見直しなど、外部要因の改善が必要である。また、かんしょ栽培は、人力に依存し機械化されていない作業や、機械の開発はされているが普及が進んでいない作業がある。そのため、スマート化の前に機械化される必要があり、一気にスマート化まで進むことは難しいと考えている。
また、本実証プロジェクトでは「省力化」という面でのスマート農業技術が主であったが、新しい技術の効果的な導入にあたっては、先に経営や人材に対する状況の見える化が必要である。筆者は、「省力化」を実現する技術だけではなく、「人材育成」も大切と考え、現在かんしょ生産の営農活動における業務の整理を行い、「人材育成」という面でのスマート農業技術(農業版iCDのかんしょバージョン(注4))の確立に取り組んでいる。この両面がそろうことで、スマート農業技術(機械化を含む)の導入促進、および導入後の利活用が定着し、企業や地域の成長につなげることが可能になるであろう。
(注4)詳細は『野菜情報』2021年12月号「組織力向上に結びつく人材育成~トップリバーが運用を始めた自己診断ツール”農業版iCD”~」(https://vegetable.alic.go.jp/yasaijoho/senmon/2112_chosa1.html)を参照されたい。
このページに掲載されている情報の発信元
農畜産業振興機構 調査情報部 (担当:企画情報グループ)
Tel:03-3583-8678
農畜産業振興機構 調査情報部 (担当:企画情報グループ)
Tel:03-3583-8678









