

ホーム > 砂糖 > 話題 > 北海道畑作の農作業の省力化に関わる課題
北海道畑作の農作業の省力化に関わる課題
最終更新日:2020年2月10日

北海道畑作の農作業の省力化に関わる課題
2020年2月号
国立研究開発法人農業・食品産業技術総合研究機構 北海道農業研究センター
大規模畑作研究領域 大規模畑輪作グループ長 辻 博之
大規模畑作研究領域 大規模畑輪作グループ長 辻 博之
【要約】
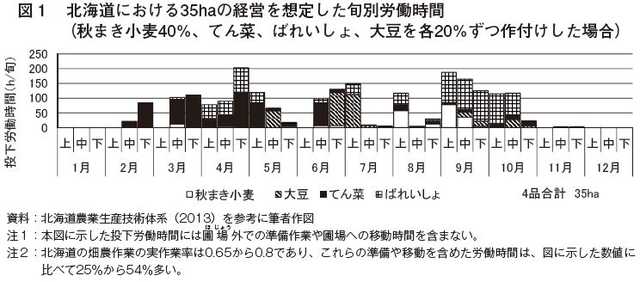
北海道の畑作では,いわゆる畑作4品目に野菜類を含めた輪作体系が行われているが、経営耕地面積が増加する中で、ばれいしょやてん菜のように面積当たりの投下労働時間が大きな作物の作付面積は減る傾向にある。本稿では、「革新的技術開発・緊急展開事業」(うち経営体強化プロジェクト)の取り組みを中心に、ばれいしょとてん菜生産に関わる、省力的な生産体系や、労働分散を可能にする技術の開発状況を述べる。
はじめに
北海道の畑作では、麦類、ばれいしょ、てん菜、豆類の4品目を中心とした輪作を基本に、野菜類を含めた輪作体系が行われている。しかし、近年では農家戸数の減少に伴い、1戸当たりの経営耕地面積の増加率は高まる傾向を示し、急激に経営耕地面積が増加する中で、労働生産性が高い麦類の作付面積が増え、ばれいしょやてん菜のように小麦に比べて収益性は高いが、面積当たりの投下労働時間が大きな作物の作付面積は減る傾向がある。北海道の畑輪作の作業競合が大きい時期は、図1に示したように、ばれいしょの植え付け、てん菜の移植が重なる4月下旬と、ばれいしょの収穫と秋まき小麦の耕起と播種が重なる9月上旬から中旬である。規模拡大と畑輪作の継続を両立するには、この時期の作業競合を軽減し、効率的な作業を行う必要がある(辻 2018)。これらの課題に取り組むため、われわれは、2017年度から2019年度に「革新的技術開発・緊急展開事業」(うち経営体強化プロジェクト。以下「プロジェクト」という)に、18機関が参画して取り組んだ。本稿は、ばれいしょとてん菜生産に関わる、省力的な生産体系や、労働分散を可能にする技術の開発状況と、プロジェクトで取り組んだ内容について述べる。
1.ばれいしょとてん菜の作業体系と省力化に向けた課題と最近の研究動向
(1)ばれいしょ
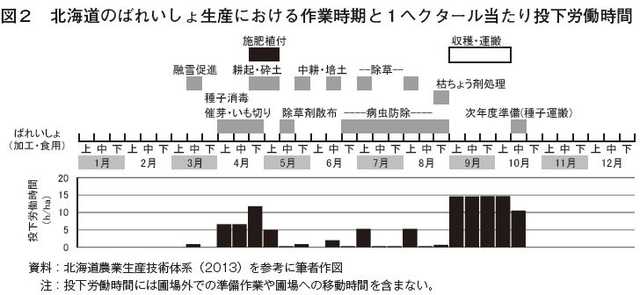
ばれいしょ生産の作業のピークは、いも切りから植え付けまでの4月上旬から5月上旬と、収穫期にあり、この時期の作業を効率的に行うことが大きな課題となっている(図2)。植え付け時の省力化については、いも切り作業の省略(全粒と二つ切りサイズの種いもを利用)を中心に取り組まれている。また収穫の省力化については、畝から土塊や礫を除去する播種床造成(ソイルコンディショニング)などが検討された。大津(2008)は、全粒種いもの利用によるいも切り作業の省略、ソイルコンディショニング、収穫後の定置選別により、ばれいしょ生産における投下労働時間を慣行の4割に削減できることを報告している。また、ソイルコンディショニングは、上いも収量は慣行の栽培法と同程度であるが、緑化割合は減少し、1個重が増加するため、規格品率が増加することが認められている(鈴木 2003)。収穫作業の作業支援は、ばれいしょの集荷業者や農協による収穫作業の受託が一部で行われている。
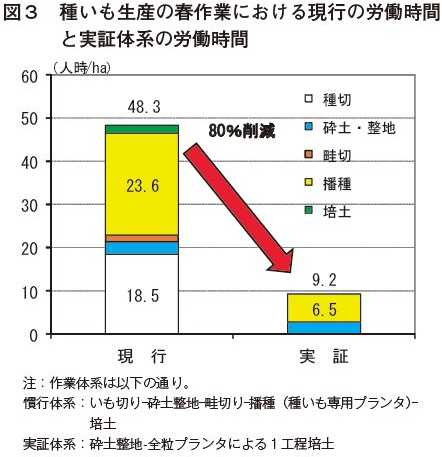
種いも生産では、植物防疫法に基づく検査に対応するため、加工用ばれいしょに比べて投下労働時間が長い。国産ばれいしょの供給の安定化を図るには、種苗供給の安定化は不可欠であり、種いも生産の省力化は大きな技術的課題である。プロジェクトでは、全粒プランタを活用した種いもの栽培体系を検討し、1工程で植え付け・施肥、培土を行う事で、種いも準備から培土までの労働時間を、約8割削減できることを確認した(図3)。しかし、実現に向けては種いも生産者に対する原原種などの供給量を増やすなどの環境整備が課題となっている。
また、種いも生産では異常株の抜き取りが負担になるため、上記のプロジェクトでは圃場をドローンで撮影した画像を、機械学習させて異常株を抽出する方法が試みられた。2017年度に収集した画像を教師データとして、畳み込みディープニューラルネットワークによる学習を行い、識別モデルを作成したところ、識別精度は同年度の画像に対しては84%まで向上した。しかし、別年度に取得した画像を同じモデルで解析すると識別精度が低下する問題が生じた、識別精度を高めて省力化に貢献するには、モデルの改良が必要と考えられる。
種いも生産では、植物防疫法に基づく検査に対応するため、加工用ばれいしょに比べて投下労働時間が長い。国産ばれいしょの供給の安定化を図るには、種苗供給の安定化は不可欠であり、種いも生産の省力化は大きな技術的課題である。プロジェクトでは、全粒プランタを活用した種いもの栽培体系を検討し、1工程で植え付け・施肥、培土を行う事で、種いも準備から培土までの労働時間を、約8割削減できることを確認した(図3)。しかし、実現に向けては種いも生産者に対する原原種などの供給量を増やすなどの環境整備が課題となっている。
また、種いも生産では異常株の抜き取りが負担になるため、上記のプロジェクトでは圃場をドローンで撮影した画像を、機械学習させて異常株を抽出する方法が試みられた。2017年度に収集した画像を教師データとして、畳み込みディープニューラルネットワークによる学習を行い、識別モデルを作成したところ、識別精度は同年度の画像に対しては84%まで向上した。しかし、別年度に取得した画像を同じモデルで解析すると識別精度が低下する問題が生じた、識別精度を高めて省力化に貢献するには、モデルの改良が必要と考えられる。
(2)てん菜
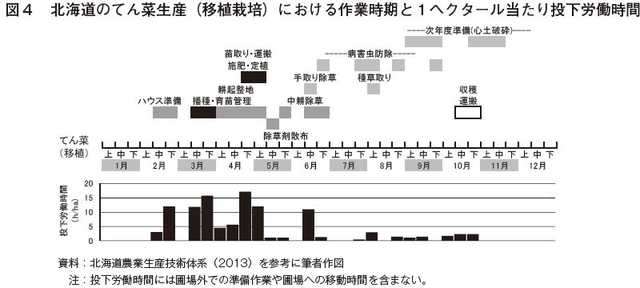
北海道におけるてん菜栽培の大きな特徴は、長さ13センチメートルの紙筒ポットで約45日育苗し、本圃に移植する紙筒移植栽培である。てん菜では育苗から定植時期の投下労働時間が大きい(図4)。紙筒移植栽培は直播栽培に比べて約15%収量が高く、1960年代に開発されてからそれまでの直播栽培に取って代わった。しかし、近年では直播栽培が見直され、十勝地域では2015年の約2万5700ヘクタールの作付面積のうち約5300ヘクタールが直播栽培となり、その後も直播の比率は増えている。
直播栽培の課題は、苗立ちの不良や出芽後の風害による収量の不安定さにあり、これらの克服が求められている。このため直播栽培の栽植様式が検討され、狭畦(条間45センチメートル程度)栽培の収量は標準栽培(60センチメートル)の収量を上回ること(有田 2003)などが報告されている。また、栽植密度は移植では10アール当たり約7000本であるのに対して、直播栽培では同約9000本に栽植密度を高めることが多い。また、風害対策として被覆作物の利用が行われている(大波ら 2006)。
てん菜では欧州製の大型機械を用いた収穫体系の導入が検討されており(樋口ら 2009)、直播の導入と収穫の外部委託により従来の3分の1まで省力化が可能であることが示されている(若林ら 2012)。プロジェクトでは、海外のてん菜生産で一般的な狭畦栽培と大型収穫機をセットで導入することを目的とし実証試験が行われた。試験は津別町で行われ、狭畦栽培(条間50センチメートル)は直播栽培と、短紙筒を用いた移植栽培の双方が検討され、短紙筒苗の定植作業と収穫作業を、生産支援組織が受託する方式が検討された(写真)。実証試験では、狭畦栽培の収量は従来の条間に比べて直播栽培で6%、移植栽培で14%の増収が認められ、1台当たりの年間稼働面積は、移植機で約60ヘクタール、収穫機で140ヘクタールであることを確認した。このような外部委託は実証試験地以外にも広まりつつあり、春の作業競合回避による輪作体系の適正化が期待できる。
直播栽培の課題は、苗立ちの不良や出芽後の風害による収量の不安定さにあり、これらの克服が求められている。このため直播栽培の栽植様式が検討され、狭畦(条間45センチメートル程度)栽培の収量は標準栽培(60センチメートル)の収量を上回ること(有田 2003)などが報告されている。また、栽植密度は移植では10アール当たり約7000本であるのに対して、直播栽培では同約9000本に栽植密度を高めることが多い。また、風害対策として被覆作物の利用が行われている(大波ら 2006)。
てん菜では欧州製の大型機械を用いた収穫体系の導入が検討されており(樋口ら 2009)、直播の導入と収穫の外部委託により従来の3分の1まで省力化が可能であることが示されている(若林ら 2012)。プロジェクトでは、海外のてん菜生産で一般的な狭畦栽培と大型収穫機をセットで導入することを目的とし実証試験が行われた。試験は津別町で行われ、狭畦栽培(条間50センチメートル)は直播栽培と、短紙筒を用いた移植栽培の双方が検討され、短紙筒苗の定植作業と収穫作業を、生産支援組織が受託する方式が検討された(写真)。実証試験では、狭畦栽培の収量は従来の条間に比べて直播栽培で6%、移植栽培で14%の増収が認められ、1台当たりの年間稼働面積は、移植機で約60ヘクタール、収穫機で140ヘクタールであることを確認した。このような外部委託は実証試験地以外にも広まりつつあり、春の作業競合回避による輪作体系の適正化が期待できる。

2.自動操舵技術やロボットトラクタの導入効果
北海道の農業では、全地球測位システム(GPS)や全球測位衛星システム(GNSS)を用いたガイダンスシステムのトラクタオペレーションへの導入が早くから検討され、その後、自動操舵の導入が都府県に先駆けて進んでおり、2018年度までの累計出荷台数は6000台となっている。自動操舵の導入はトラクタオペレータの負担軽減に効果があると考えられているが、実際の作業において労働負担の軽減効果を検証した例はほとんどない。そこで、大豆の中耕除草作業中のオペレータの負担を、心拍数と唾液アミラーゼ活性を指標として調査した(辻ら 2019)。
その結果、身体的な負担の指標値であるオペレータの心拍数は、作業時とその前後の差が小さく、自動操舵区と手動操作区の心拍数には有意差は認められなかった(データ不掲載)。
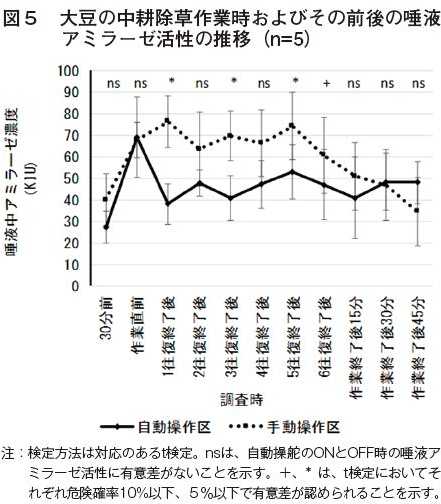
一方、唾液アミラーゼ活性は、大豆の中耕除草作業の開始直前に上昇を示した。唾液アミラーゼ活性の値には大きな個人差が認められたが、それぞれのオペレータの唾液アミラーゼ活性は手動操作区に比べて自動操舵区でほぼ一貫して低かった。特に、作業を1往復、3往復、5往復終了した後の唾液アミラーゼ活性は手動操作区に比べて自動操舵区で危険確率5%以下の有意な低下が認められた(図5)。以上の結果から、トラクタ作業に自動操舵を使うことで精神的な負担を緩和し、オペレータの疲労を軽減していると考えられた。辻(2018)は自動操舵技術を導入した11人のオペレータにアンケートを実施し、自動操舵技術導入時の生産者の期待と導入後の実感について調査した。オペレータは、作業精度の向上と作業負担の軽減を期待しており、導入後に実感した効果も同程度に高かった。また、自動操舵技術は1人当たりの負担面積の増加に対応する技術として期待しており、経営面積の拡大に対応する技術としての効果が大きいと回答していた。しかし、自動操舵を使うことで省力化が図れる作業は、ごく一部であると考えられ、オペレータの作業時間を増やすことで、負担面積を増やしていることが懸念される。このようなことから、自動操舵の導入に合わせて、新規オペレータの育成を図るなどの対策を実施しないと、労働負担軽減の根本的な解決手段にならない。
また、最近は無人作業が可能な、ロボットトラクタが発売されている。ロボットトラクタは作業員の監視の下で作業を無人化できる。しかし、畑作のトラクタを用いた作業は、耕起、施肥、播種、中耕・培土、防除、収穫など多様であるのに対して、現行のロボットトラクタはそれらの一部にしか対応していないという問題がある。プロジェクトでは、ロボットトラクタを用いてばれいしょの1年間の作業を行い、ロボットトラクタを畑作に普及するにはどのような改良が必要かを検討した。その結果、現行のロボットトラクタが可能な作業は、リバーシブルプラウ以外の耕起、整地作業、播種・施肥作業、中耕作業などであり、リバーシブルプラウによる耕起、ブームスプレーヤによる防除、ポテトハーベスタのけん引などの作業をロボットトラクタで実施するには、トラクタの作業パスをそれらの作業にあわせて開発することが必要であった。また、プラウ作業やスプレーヤの制御には作業機側の改良も必要であり、作業機メーカを含めた対応が必要であることが明らかとなった。
その結果、身体的な負担の指標値であるオペレータの心拍数は、作業時とその前後の差が小さく、自動操舵区と手動操作区の心拍数には有意差は認められなかった(データ不掲載)。
一方、唾液アミラーゼ活性は、大豆の中耕除草作業の開始直前に上昇を示した。唾液アミラーゼ活性の値には大きな個人差が認められたが、それぞれのオペレータの唾液アミラーゼ活性は手動操作区に比べて自動操舵区でほぼ一貫して低かった。特に、作業を1往復、3往復、5往復終了した後の唾液アミラーゼ活性は手動操作区に比べて自動操舵区で危険確率5%以下の有意な低下が認められた(図5)。以上の結果から、トラクタ作業に自動操舵を使うことで精神的な負担を緩和し、オペレータの疲労を軽減していると考えられた。辻(2018)は自動操舵技術を導入した11人のオペレータにアンケートを実施し、自動操舵技術導入時の生産者の期待と導入後の実感について調査した。オペレータは、作業精度の向上と作業負担の軽減を期待しており、導入後に実感した効果も同程度に高かった。また、自動操舵技術は1人当たりの負担面積の増加に対応する技術として期待しており、経営面積の拡大に対応する技術としての効果が大きいと回答していた。しかし、自動操舵を使うことで省力化が図れる作業は、ごく一部であると考えられ、オペレータの作業時間を増やすことで、負担面積を増やしていることが懸念される。このようなことから、自動操舵の導入に合わせて、新規オペレータの育成を図るなどの対策を実施しないと、労働負担軽減の根本的な解決手段にならない。
また、最近は無人作業が可能な、ロボットトラクタが発売されている。ロボットトラクタは作業員の監視の下で作業を無人化できる。しかし、畑作のトラクタを用いた作業は、耕起、施肥、播種、中耕・培土、防除、収穫など多様であるのに対して、現行のロボットトラクタはそれらの一部にしか対応していないという問題がある。プロジェクトでは、ロボットトラクタを用いてばれいしょの1年間の作業を行い、ロボットトラクタを畑作に普及するにはどのような改良が必要かを検討した。その結果、現行のロボットトラクタが可能な作業は、リバーシブルプラウ以外の耕起、整地作業、播種・施肥作業、中耕作業などであり、リバーシブルプラウによる耕起、ブームスプレーヤによる防除、ポテトハーベスタのけん引などの作業をロボットトラクタで実施するには、トラクタの作業パスをそれらの作業にあわせて開発することが必要であった。また、プラウ作業やスプレーヤの制御には作業機側の改良も必要であり、作業機メーカを含めた対応が必要であることが明らかとなった。
おわりに
急激に進行する規模の拡大の中で輪作を維持するために、より省力的な作業技術や大型機械利用技術、情報利用による適切な作業や精密農業技術の開発が進められてきた。しかし、家族経営による規模拡大は限界に達しつつあり、今後は農業経営外の労働力による高精度な作業支援が必要になると考えられる。円滑な支援には自動操舵や情報支援技術がより重要になると考えられる。
プロジェクトでは、畑輪作の省力化と作業競合の回避を図るため、作業の外部委託、作業の簡素化、情報通信技術(ICT)を活用した軽労化や無人作業の拡大を中心に取り組んできた。狭畦栽培と大型収穫機を実証した地域では、いったんてん菜の作付けをやめた生産者が、技術導入を契機にてん菜の作付けを再開しており、生産支援の導入が単に省力化を進めるだけでなく、輪作の適正な実施に寄与することが明らかになっている。また、これらの実証試験を契機に、実証地域では作業体系やこれまでの作業上のルールが議論されるようになってきた。例えば、狭畦栽培と大型収穫機を実証した地域では、これまで直播栽培の普及が遅れていたが(実証試験開始前10%)、実証試験を契機に直播栽培の導入が進んでいる。また、収穫物の搬送・集荷方法についても議論が始まっており、より合理的な生産方式が、生産者・支援組織・運送業者・実需間の協議の下で進むことが期待される。
プロジェクトでは、畑輪作の省力化と作業競合の回避を図るため、作業の外部委託、作業の簡素化、情報通信技術(ICT)を活用した軽労化や無人作業の拡大を中心に取り組んできた。狭畦栽培と大型収穫機を実証した地域では、いったんてん菜の作付けをやめた生産者が、技術導入を契機にてん菜の作付けを再開しており、生産支援の導入が単に省力化を進めるだけでなく、輪作の適正な実施に寄与することが明らかになっている。また、これらの実証試験を契機に、実証地域では作業体系やこれまでの作業上のルールが議論されるようになってきた。例えば、狭畦栽培と大型収穫機を実証した地域では、これまで直播栽培の普及が遅れていたが(実証試験開始前10%)、実証試験を契機に直播栽培の導入が進んでいる。また、収穫物の搬送・集荷方法についても議論が始まっており、より合理的な生産方式が、生産者・支援組織・運送業者・実需間の協議の下で進むことが期待される。
(引用文献)
・有田敬俊(2003)「テンサイ直播狭畦栽培の収量性とその要因」『てん菜研究会報』45.pp.14-19.
・樋口昭則、渡邉大樹、仙北谷康(2009)「てん菜自走式多畦収穫機の定着可能性の検討」『農業経営研究』47(1).pp.70-75.
・大波正寿、稲野一郎、鈴木剛、梶山努(2006)「テンサイ直播栽培における被覆作物利用による風害軽減効果」『育種・作物北海道談話会報』47.pp.61-62.
・大津英子(2008)「加工用バレイショのソイルコンディショニング栽培体系」『農機誌』70(6).pp.8-11.
・鈴木剛(2003)「バレイショ播種床造成栽培法における収量性の向上と適応土壌型」『北海道立農試集報』85.pp.21-24.
・辻博之(2018)「北海道畑作の大規模化における課題と今後の展望」『農作業研究』53(1).pp.3-13.
・辻博之、澁谷幸憲、西脇健太郎(2019)「北海道畑作における自動操舵トラクタの導入効果と可変施肥技術導入の取り組み」『農研機構研究報告』1.pp.19-25.
・若林勝史、石田茂樹、大津英子(2012)「てんさい直播とばれいしょソイルコンディショニングを核とする新生産体系の経営的評価」『北農』79.pp.39-44.
・有田敬俊(2003)「テンサイ直播狭畦栽培の収量性とその要因」『てん菜研究会報』45.pp.14-19.
・樋口昭則、渡邉大樹、仙北谷康(2009)「てん菜自走式多畦収穫機の定着可能性の検討」『農業経営研究』47(1).pp.70-75.
・大波正寿、稲野一郎、鈴木剛、梶山努(2006)「テンサイ直播栽培における被覆作物利用による風害軽減効果」『育種・作物北海道談話会報』47.pp.61-62.
・大津英子(2008)「加工用バレイショのソイルコンディショニング栽培体系」『農機誌』70(6).pp.8-11.
・鈴木剛(2003)「バレイショ播種床造成栽培法における収量性の向上と適応土壌型」『北海道立農試集報』85.pp.21-24.
・辻博之(2018)「北海道畑作の大規模化における課題と今後の展望」『農作業研究』53(1).pp.3-13.
・辻博之、澁谷幸憲、西脇健太郎(2019)「北海道畑作における自動操舵トラクタの導入効果と可変施肥技術導入の取り組み」『農研機構研究報告』1.pp.19-25.
・若林勝史、石田茂樹、大津英子(2012)「てんさい直播とばれいしょソイルコンディショニングを核とする新生産体系の経営的評価」『北農』79.pp.39-44.
このページに掲載されている情報の発信元
農畜産業振興機構 調査情報部 (担当:企画情報グループ)
Tel:03-3583-8678
農畜産業振興機構 調査情報部 (担当:企画情報グループ)
Tel:03-3583-8678









