

ホーム > 砂糖 > 調査報告 > その他 > トラクタの直線作業をアシストする自動操舵システム
トラクタの直線作業をアシストする自動操舵システム
最終更新日:2017年5月10日
トラクタの直線作業をアシストする自動操舵システム
〜独自の画像処理技術により低価格と高精度を実現〜
2017年5月
国立研究開発法人農業・食品産業技術総合研究機構 農業技術革新工学研究センター
総合機械化研究領域 果樹生産工学ユニット ユニット長 塙 圭二
総合機械化研究領域 果樹生産工学ユニット ユニット長 塙 圭二
【要約】
農研機構と三菱マヒンドラ農機(本社島根県松江市)は、トラクタのステアリングを自動制御し、高精度な直線走行を実現する自動操舵システムを共同で開発した。開発したシステムを既存のトラクタに設置することで、播種、畝立て、マルチ敷設などの難しい作業が、非熟練者でも楽々簡単に行えるようになる。独自開発の画像処理技術により、従来品より大幅な低価格化を達成した。開発したシステムは平成29年度下期から販売開始される予定である。
1.開発の背景
播種、畝立て、マルチ敷設などの作業では、行程を直線的かつ前行程と一定間隔に保つことが重要であり、トラクタを使ったこれらの作業では、オペレーターには高度な運転技術が要求される。また、オペレーターはトラクタの運転に加え、作業機の動作状態の監視も必要であり、オペレーターの負担は大きいものとなっている。一方、近年は農業従事者の高齢化や離農などによって、熟練オペレーターは不足する状況にあり、規模の拡大や農業の継続において、オペレーターの安定的な確保が課題となっている。また、農繁期における長時間労働の傾向に対し、農作業事故防止の観点から、オペレーターの負担軽減も望まれている。このような背景から、作業時のトラクタのステアリングを自動制御することで、真っすぐで等間隔な畝立てや播種が、非熟練者でも簡単にできる自動操舵システムの開発を行った。
2.自動操舵システムの現状
全地球測位システム(GPS)を用いた自動操舵システムが既に実用化され、北海道を中心に普及が進んでいる。北海道での自動操舵システムの販売数は、平成26年度は480台、27年度は730台と急拡大しており、前述のような背景から高いニーズがあると推測される。一方、本州以南の地域の合計は、26、27年度ともに約30台と横ばいであり、この要因として自動操舵システムの価格が考えられる。播種や畝立てなどの作業では、高精度なRTK-GPS(注)を使用する必要があり、現状では200万〜300万円程度の価格となっている。北海道では2000万円を超える大型トラクタが多く普及するが、本州以南では本体価格が400万〜600万円程度の中小型トラクタが中心であり、自動操舵システムの価格は相対的に割高な状態となっている。このような状況から、本州以南にも普及を進めるには、中小型トラクタの本体価格の10%程度まで低価格化した自動操舵システムの開発が必要と考えられる。
(注)リアルタイムキネマティックGPSの略称。位置の誤差を補正する情報を携帯電話や無線通信によって受信することで、誤差1〜2センチメートルの高い精度を得る方式のGPS。ただし、携帯電話からの情報は有料であり、無線通信には近隣にGPSの固定局が必要となる。
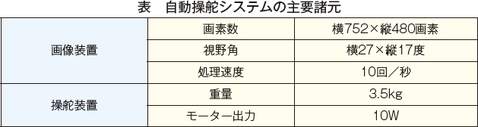
3.自動操舵システムの構成
開発した自動操舵システム(以下「本システム」という)は、既存のキャビン付きトラクタに画像装置と操舵装置を後付け装着する構成である(写真1、表)。画像装置は単眼式のカメラと小型計算機が一体化した市販機器を中心として筐体に収納した構造で、キャビン内の上部に取り付けられ、トラクタ前方の風景と地面を撮像し、その画像を独自に開発したアルゴリズムで解析し、走行制御に必要な各種の情報を抽出する。操舵装置はメーターパネルのバイザー上に固定され、操作レバーに内蔵された小型モーターで駆動されるローラーによって、ステアリングホイールを外周から回転させる構造であり、画像装置から出力される信号に応じて操舵制御を行う。また、画像装置には無線LANによる通信機能が装備されており、ユーザーが所有するスマートフォンと接続して、カメラ画像の表示や後述する操作を行うことができる。

4.自動操舵システムの機能
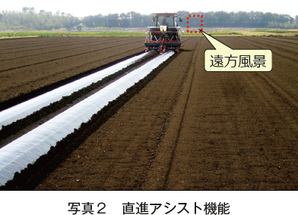
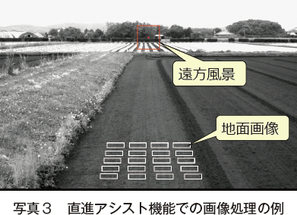
本システムは、直進アシスト機能と追従アシスト機能と称する2種類の機能を備えている。まず、直進アシスト機能は、トラクタによる作業の最初の1行程目で使用することを想定した機能であり、畑の遠方側の目標地点に向かって直進走行を行う(写真2)。写真3は画像装置によるカメラ画像の処理結果の例であり、赤枠線内のような目標地点の遠方風景の画像を走行開始時に記憶し、この画像を追跡する。同時に画像の手前部分の白枠線のように、複数の地面の画像を追跡することで、トラクタの横方向の位置ずれを検知し、目標地点に向けた直進走行を高精度に自動制御する。
続いて追従アシスト機能は、2行程目以降で使用することを想定した機能であり、前行程の作業跡やマーカー跡の位置に対して、トラクタが横方向に一定の間隔を保って走行するように操舵を自動制御する(写真4)。写真5はカメラ画像の処理結果の例であり、まずトラクタの前方10メートル付近の地面の凹凸形状を算出し(写真5中の白点線)、続いて凹凸形状から前行程の作業跡やV字形のマーカー跡の位置を検出し(写真5中の赤線)、マーカー跡に対しては、トラクタがマーカー跡の真上を走行するように自動制御し、一方、作業跡に対しては、一定の間隔を保持するように自動制御する。

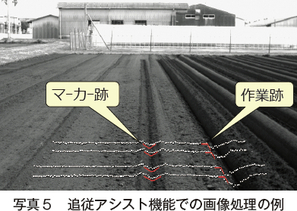
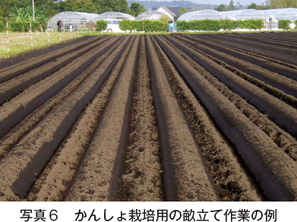
写真6はかんしょ栽培用の畝立て作業に本システムを適用した結果の例である。作業軌跡の精度は、おおむね行程の80%以上で±5センチメートル以内となり、熟練オペレーターと同レベルの精度が得られる。また、追従アシスト機能では、少々曲がった畑や行程にも対応が可能であり、曲率半径(メートル)で400R程度までの円弧に追従できる(写真7)。ただし、曲がった作業跡への追従では、作業精度が10センチメートルを超える誤差を生じる場合もあり、あらかじめ行程間隔を広めに設定するなどの対応が必要である。

5.自動操舵システムの操作方法
本システムの2種類の機能や、追従アシスト機能における追従対象の選択は、写真1右の操作スイッチで行う。また、操作レバーを手動で動かすことで、自動操舵と手動操舵が切り替えられる。直進アシスト機能での目標地点の位置は、操作レバーを引いて自動操舵を開始した時のトラクタの真正面の位置を目標地点として自動的に記憶し、さらに、前述のようにスマートフォンを接続すると、スマートフォンの画面上の操作で、目標地点の位置を左右に移動することができる。追従アシスト機能での作業跡とトラクタの間隔は、まず、自動操舵を開始した時の間隔を自動的に記憶し、上記と同様にスマートフォンの画面上の操作で増減することができる。
おわりに
既存の高精度GPSを使用する自動操舵システムに対し、本システムはカメラをセンサーとして使用することが大きな特徴であり、その結果、大幅な低価格化が可能となった。開発に当たり、鹿児島県農業開発総合センター大隅支場において、かんしょ栽培用の畝立て作業への適用を想定した試験を行い、農機研究室の方々より多大な協力と助言を頂いた。また、鹿児島県のかんしょ生産者に本システムを使って頂き、有効性を確認した。本システムは、三菱マヒンドラ農機から平成29年度下期に販売開始される予定であり、価格は中小型トラクタの10%程度となる見込みである。現在、自動車の分野では自動ブレーキなどの運転支援システムの普及が急拡大している。今日ではカメラが自動ブレーキのセンサーの中核となっており、高性能化と低価格化の原動力となっている。トラクタの分野においても、今後、カメラを使った自動操舵などの運転支援システムの普及拡大が進むものと期待される。
このページに掲載されている情報の発信元
農畜産業振興機構 調査情報部 (担当:企画情報グループ)
Tel:03-3583-8678
農畜産業振興機構 調査情報部 (担当:企画情報グループ)
Tel:03-3583-8678









